

Bluetooth: El Futuro de las Comunicaciones (I)
por SpliT ...Harald Bluetooth (Harald "Dientes Azules") fue un gran rey Vikingo que unió Dinamarca y Noruega en el siglo X. Su nombre quedará, no obstante, para siempre ligado a la tecnología revolucionaria que permite a los aparatos electrónicos trabajaren en conjunto sin necesidad de cables: el Bluetooth.
¿Que es Bluetooth?
Es la norma que define un estándar global de comunicación inalámbrica, que posibilita la transmisión de voz y datos entre diferentes equipos mediante un enlace por radiofrecuencia. Los principales objetivos que se pretende conseguir con esta norma son:
- Facilitar la comunicación entre equipos móviles y fijos.
- Eliminar cables y conectores entre estos.
- Ofrecer la posibilidad de crear pequeñas redes inalámbricas y facilitar la sincronización de datos entre equipos personales.
La tecnología Bluetooth comprende hardware, software y requerimientos de interoperatibilidad, por lo que para su desarrollo ha sido necesaria la participación de los principales fabricantes de los sectores de las telecomunicaciones y la informática, tales como: Ericsson, Nokia, Toshiba, IBM, Intel, 3Com, Agere, Ericsson y Microsoft. Posteriormente se han ido incorporando muchas más compañías, y se prevé que próximamente los hagan también empresas de sectores tan variados como: automatización industrial, maquinaria, ocio y entretenimiento, fabricantes de juguetes, electrodomésticos, etc., con lo que en poco tiempo se nos presentará un panorama de total conectividad de nuestros aparatos tanto en casa como en el trabajo.

¿Como funciona Bluetooth?
El primer objetivo para los productos Bluetooth era los entornos de la gente de negocios. Por lo que se pensó en integrar el chip de radio Bluetooth en equipos como: ordenadores portátiles, teléfonos móviles, agendas electrónicas, auriculares… Esto generaba una serie de cuestiones previas que deberían solucionarse tales como:
- El sistema debería operar en todo el mundo.
- El emisor de radio deberá consumir poca energía, ya que debe integrarse en equipos alimentados por baterías.
- La conexión debería soportar voy y datos, y por lo tanto aplicaciones multimedia.
Para poder operar en todo el mundo es necesaria una banda de frecuencia abierta a cualquier sistema de radio independientemente del lugar del planeta donde nos encontremos. Sólo la banda ISM (médico-científica internacional) de 2,45 GHz cumple con éste requisito, con rangos que van de los 2.400 MHz a los 2.500 MHz, y solo con algunas variaciones de ancho de banda en países como Francia, España y Japón, y no necesita licencia.
Salto de frecuencia
Debido a que la banda ISM está abierta a cualquiera, el sistema de radio Bluetooth deberá estar preparado para evitar las múltiples interferencias que se pudieran producir. Éstas pueden ser evitadas utilizando un sistema que busque una parte no utilizada del espectro o un sistema de salto de frecuencia. En este caso la técnica de salto de frecuencia es aplicada a una alta velocidad y una corta longitud de los paquetes (1600 saltos/segundo). Éste sistema divide la banda de frecuencia en varios canales de salto, donde, los transceptores, durante la conexión van cambiando de uno a otro canal de salto de manera pseudo-aleatoria. Con esto se consigue que el ancho de banda instantáneo sea muy pequeño y también una propagación efectiva sobre el total de ancho de banda. Los paquetes de datos están protegido por un esquema ARQ (repetición automática de consulta), en el cual los paquetes perdidos son automáticamente retransmitidos, aun así, con este sistema, si un paquete de datos no llegase a su destino, sólo una pequeña parte de la información se perdería. La voz no se retransmite nunca, sin embargo, se utiliza un esquema de codificación muy robusto. En conclusión, con el sistema FH (Salto de frecuencia), se pueden conseguir transceptores de banda estrecha con una gran inmunidad a las interferencias.
El canal
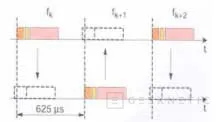
Bluetooth utiliza un sistema FH/TDD (salto de frecuencia/división de tiempo duplex), en el que el canal queda dividido en intervalos de 625 µs, llamados slots, donde cada salto de frecuencia es ocupado por un slot. Esto da lugar a una frecuencia de salto de 1600 veces por segundo, en la que un paquete de datos ocupa ocupar un slot para la emisión y otro para la recepción y que pueden ser usados alternativamente, dando lugar a un esquema de tipo TDD.
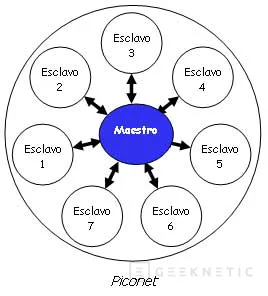
Dos o más unidades Bluetooth pueden compartir el mismo canal dentro de una piconet (pequeña red que establecen automáticamente los terminales Bluetooth para comunicarse entre si), donde una unidad actúa como maestra, controlando el tráfico de datos en la piconet que se genera entre las demás unidades, donde estas actúan como esclavas, enviando y recibiendo señales hacia el maestro. El salto de frecuencia del canal está determinado por la secuencia de la señal, es decir, el orden en que llegan los saltos y por la fase de ésta secuencia. En Bluetooth, la secuencia queda fijada por la identidad de la unidad maestra de la piconet (un código único para cada equipo), y por su frecuencia de reloj.
Datagrama Bluetooth
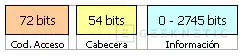
La información que se intercambia entre dos unidades Bluetooth se realiza mediante un conjunto de slots que forman un paquete de datos. Cada paquete comienza con un código de acceso de 72 bits, que se deriva de la identidad maestra, seguido de un paquete de datos de cabecera de 54 bits. Éste contiene importante información de control, como tres bits de acceso de dirección, tipo de paquete, bits de control de flujo, bits para la retransmisión automática de la pregunta, y chequeo de errores de campos de cabeza. La dirección del dispositivo es en forma hexadecimal (00:07:A4:00:03:75). Finalmente, el paquete que contiene la información, que puede seguir al de la cabecera, tiene una longitud de 0 a 2745 bits.
En cualquier caso, cada paquete que se intercambia en el canal está precedido por el código de acceso. Los receptores de la piconet comparan las señales que reciben con el código de acceso, si éstas no coinciden, el paquete recibido no es considerado como válido en el canal y el resto de su contenido es ignorado.
Piconets
Como hemos citado anteriormente si un equipo se encuentra dentro del radio de cobertura de otro, éstos pueden establecer conexión entre ellos. Cada dispositivo tiene una dirección única de 48 bits, basada en el estándar IEEE 802.11 para WLAN. En principio sólo son necesarias un par de unidades con las mismas características de hardware para establecer un enlace. Dos o más unidades Bluetooth que comparten un mismo canal forman una piconet. Para regular el tráfico en el canal, una de las unidades participantes se convertirá en maestra, pero por definición, la unidad que establece la piconet asume éste papel y todos los demás serán esclavos. Los participantes podrían intercambiar los papeles si una unidad esclava quisiera asumir el papel de maestra. Sin embargo sólo puede haber un maestro en la piconet al mismo tiempo.
Bluetooth se ha diseñado para operar en un ambiente multi-usuario. Los dispositivos pueden habilitarse para comunicarse entre sí e intercambiar datos de una forma transparente al usuario. Hasta ocho usuarios o dispositivos pueden formar una piconet y hasta diez Piconets pueden coexistir en una misma área de cobertura. Dado que cada enlace es codificado y protegido contra interferencia y pérdida de enlace, Bluetooth puede considerarse una red inalámbrica de corto alcance y muy segura.
Medios y velocidades
Además de los canales de datos, están habilitados tres canales de voz de
64 kbit/s por piconet. Las conexiones son uno a uno con un rango máximo de diez metros, aunque utilizando amplificadores se puede llegar hasta los 100 metros, pero en este caso se introduce alguna distorsión. Los datos se pueden intercambiar a velocidades de hasta 1 Mbit/s. El protocolo bandabase que utiliza Bluetooth combina las técnicas de circuitos y paquetes para asegurar que los paquetes llegan en orden.
La velocidad de un canal asimétrico de datos puede llegar a 721 Kbits/s en un sentido y 57,6 Kbits/s en el otro. O de 432,6 Kbits/s en ambos sentidos si el enlace es simétrico.
Scatternet
Los equipos que comparten un mismo canal sólo pueden utilizar una parte de su capacidad de este. Aunque los canales tienen un ancho de banda de un 1Mhz, cuantos más usuarios se incorporan a la piconet, disminuye la capacidad hasta unos 10 kbit/s más o menos. Teniendo en cuenta que el ancho de banda medio disponible es de unos 80 MHz en Europa y USA (excepto en España y Francia), éste no puede ser utilizado eficazmente, cuando cada unidad ocupa una parte del mismo canal de salto de 1Mhz. Para poder solucionar éste problema se adoptó una solución de la que nace el concepto de scatternet.
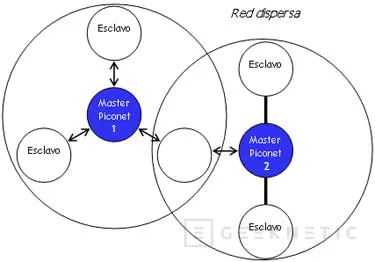
Las unidades que se encuentran en el mismo radio de cobertura pueden establecer potencialmente comunicaciones entre ellas. Sin embargo, sólo aquellas unidades que realmente quieran intercambiar información comparten un mismo canal creando la piconet. Éste hecho permite que se creen varias piconets en áreas de cobertura superpuestas.
A un grupo de piconets se le llama scatternet. El rendimiento, en conjunto e individualmente de los usuarios de una scatternet es mayor que el que tiene cada usuario cuando participa en un mismo canal de 1 MHz. Además, estadísticamente se obtienen ganancias por multiplexación y rechazo de canales salto. Debido a que individualmente cada piconet tiene un salto de frecuencia diferente, diferentes piconets pueden usar simultáneamente diferentes canales de salto.
Hemos de tener en cuenta que cuantas más piconets se añaden a la scatternet el rendimiento del sistema FH disminuye poco a poco, habiendo una reducción por termino medio del 10%. Sin embargo el rendimiento que finalmente se obtiene de múltiples piconets supera al de una simple piconet. Para acceder a la segunda parte del tutorial haz clic aquí.
Fin del Artículo. ¡Cuéntanos algo en los Comentarios!







